|
GoSLAM VS120
GoSLAM移动测量系统采用SLAM技术(simultaneous localization and mapping)即实时定位与建图技术,不依赖于GPS等GNSS定位,在室内外空间等未知环境移动中,进行自身定位及增量式三维建图。 GoSLAM致力于提供以用户为核心的三维激光移动扫描测量系统产品解决方案,为用户带来更佳的作业体验。
|

|
|
|
|
强大性能
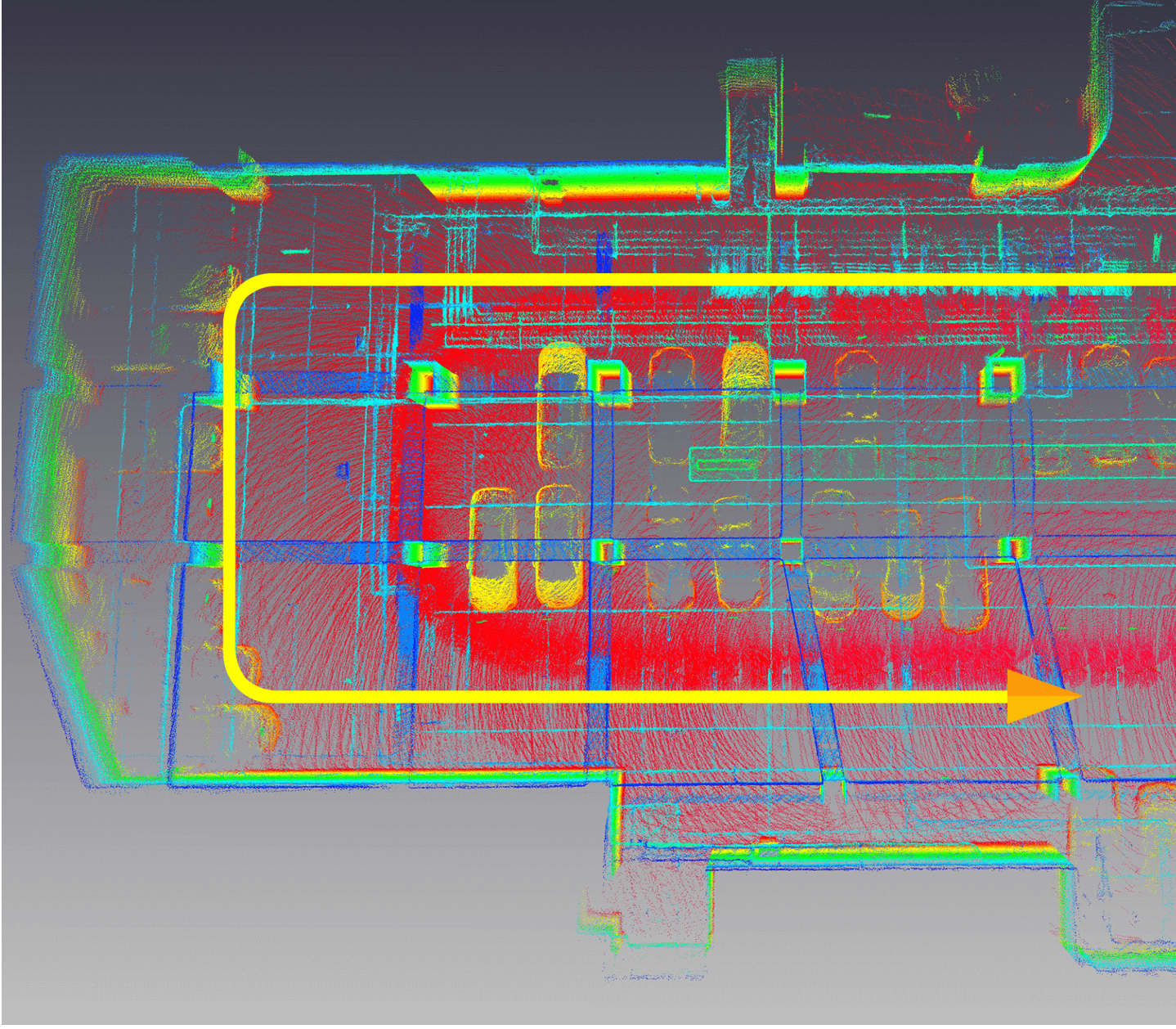
配备水平固定式激光头, 120米射程,每秒采集32万点能力的VS120移动测量系统,具有360°水平视场角,点精度最高可达1cm,产品无外露机械结构,整体性更强,更加稳定耐用。
|

|
|
|
RTD实时解算技术
VS120产品具备独特的RTD实时解算技术,可以 在扫描过程中实时进行SLAM解算,扫描完成 无需等待导出即可使用,效率大幅提升。 |
更强耐候性及多平台支持
VS120 系统具备超强耐候性,可在-35-60℃环境下作业,继承了优良的平台兼容性,支持背包、无人机、车载、无人船、机器狗等多种平台扫描方式,满足你对移动测量的多种想象。
|
|

|
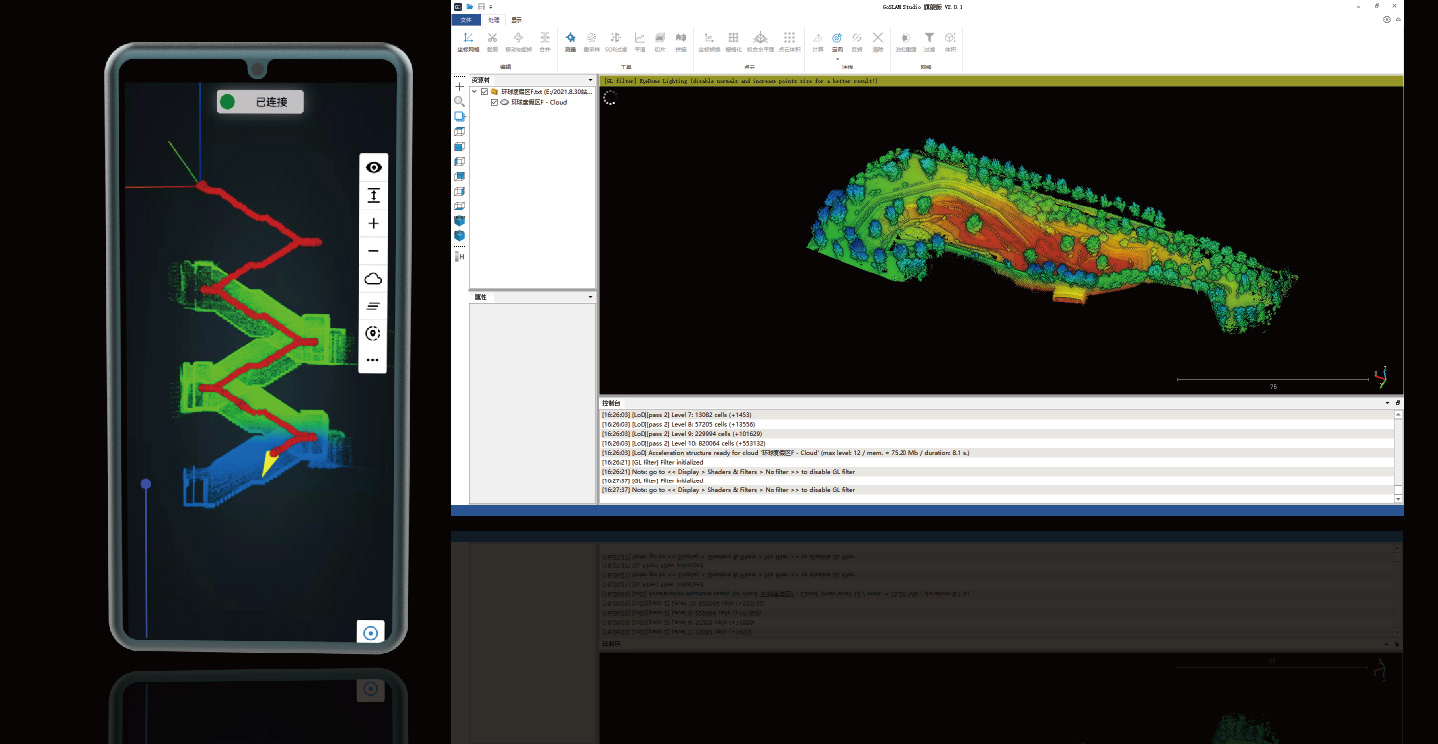
触控屏实时预览
手持设备端内置高清触控屏,可以在作业时实时 预览扫描数据,避免数据错层失锁等问题, 确保数据无误。 |
开放性系统平台
|
 |
|
GoSLAM Studio旗舰版软件 是为GoSLAM系列移动 三维扫描仪专门设计开发的一款集设备应用与点云 处理于一身的配套型软件,同时也兼容第三方 设备点云处理。
软件具有一键点云去噪、点云拼接、阴影渲染、坐标转换、 自动拟合水平面、自动生成点云数据报告、正摄影像、 点云封装八大基本功能。GoSLAM专为堆体体积计量 增添一键堆体数据生成的功能,使数据获取更加便捷。 |
|