- ��ҳ
- ��������
- Ӳ���豸
-
 Artec 3Dɨ����
Artec Ray II
Artec Eva
Artec Space Spider
Artec Leo
Artec Micro ��
Artec������
Artec 3Dɨ����
Artec Ray II
Artec Eva
Artec Space Spider
Artec Leo
Artec Micro ��
Artec������
-
 Faro ��άɨ����
FARO® Focus Premium
FARO Focus Core
FARO® FREESTYLE 2
Faro ��άɨ����
FARO® Focus Premium
FARO Focus Core
FARO® FREESTYLE 2
-
 Faro��ҵ����ɨ����
Quantum Max FaroArm
FARO® Quantum Max ScanArm
Faro��ҵ����ɨ����
Quantum Max FaroArm
FARO® Quantum Max ScanArm
-
 FARO������
FARO® Vantage Laser Trackers
FARO������
FARO® Vantage Laser Trackers
-
 FARO® Tracer ����ͶӰ��
FARO® Tracer ����ͶӰ��
FARO® Tracer ����ͶӰ��
FARO® Tracer ����ͶӰ��
-
 ���˻���б��Ӱϵͳ
MS-Smart2
���˻���б��Ӱϵͳ
MS-Smart2
-
 RIEGL���漤��ɨ����
RIEGL VZ-400i
RIEGL VZ-2000i
RIEGL VZ-4000
RIEGL VZ-6000
RIEGL���漤��ɨ����
RIEGL VZ-400i
RIEGL VZ-2000i
RIEGL VZ-4000
RIEGL VZ-6000
-
 GoSLAM�ƶ�����
��Яʽ������ú������
GoSLAM VS120
GoSLAM RS100S
GoSLAM RS100i
GoSLAM DS100
GoSLAM VS50/VS100
GoSLAM�ƶ�����
��Яʽ������ú������
GoSLAM VS120
GoSLAM RS100S
GoSLAM RS100i
GoSLAM DS100
GoSLAM VS50/VS100
-
 DJI�����˻�����ƽ̨
��γ Matrice 200 V2 ϵ��
��γ M600 PRO
���� PHANTOM 4 RTK
��γ Matrice 300 RTK
DJI�����˻�����ƽ̨
��γ Matrice 200 V2 ϵ��
��γ M600 PRO
���� PHANTOM 4 RTK
��γ Matrice 300 RTK
-
 �߷ֱ��ʺ������
��˼ iXU 180
��˼ iXU 150
�߷ֱ��ʺ������
��˼ iXU 180
��˼ iXU 150
-
 ��������
��������
��������
��������
-
 �����״�
OS1-GEN 2�����״�
�����״�
OS1-GEN 2�����״�
-
 ��άɨ�������
���������
�⾵������
TSP��λװ��
��άɨ�������
���������
�⾵������
TSP��λװ��
-
 ATS�����
ATS�����
ATS�����
ATS�����
-
- ������Ʒ
-
 FARO����ϵ��
AS-BUILT FOR AUTOCAD®
AS-BUILT FOR REVIT®
FARO Scene2019
BUILDIT CONSTRUCTION
FARO����ϵ��
AS-BUILT FOR AUTOCAD®
AS-BUILT FOR REVIT®
FARO Scene2019
BUILDIT CONSTRUCTION
-
 Clear Edge����ϵ��
EdgeWise Plant
EdgeWise MEP For Revit
EdgeWise Building
EdgeWise Structure
ClearEdge Verity
Clear Edge����ϵ��
EdgeWise Plant
EdgeWise MEP For Revit
EdgeWise Building
EdgeWise Structure
ClearEdge Verity
-
 3D Reshaper����ϵ��
3D Reshaper
3D Reshaper LSDK
3D Reshaper����ϵ��
3D Reshaper
3D Reshaper LSDK
-
 Arena4D
Arena4D
Arena4D
Arena4D
-
 Artec ��������
Artec Studio 17
Artec ��������
Artec Studio 17
-
 PhotoScan����ϵ��
PhotoScan����ϵ��
PhotoScan����ϵ��
PhotoScan����ϵ��
-
 Onrol�����з���Ʒ
�ռ����������
�����״��ۺ�Ӧ��ƽ̨
InfoPano
Onrol�����з���Ʒ
�ռ����������
�����״��ۺ�Ӧ��ƽ̨
InfoPano
-
- ��ҵӦ��
- ��������ľ���� ���й滮 ���ֳ��� �������� ��·���� ������� �����ṹ��ȫ��� �����ֺ����� �������� ��·���� �������ۿ� ���������������
- �����Ų����� �Ž������� ��ַ�ھ� �������¼ ���ֲ����
- ���������Ӧ�� ���β�� ���¼�� ������ҵ ��ҵ���� ��ú��
- ������ˮ��Ӧ�� ���վ ����Ѳ�� ˮ����
- ����ҵ�����ֹ��� ������ʩ �������� ���ա���������
- ������ȫӦ�� ��ͨ�¹� �����ֳ�
- �ɹ�����
- ����ר��
- ����֧��
- ��������
- ��ѵר��
















����1����
GEOSLAM-REVO���

EOSLAM-REVO��Ӣ�����ֳ�ʽ��ά����ɨ��ϵͳ��
�з��������Ĵ����ǹ��ҿ��л���CSIRO ��Ӣ����3D laser mapping��˾��
����SLAM��������ʱ��λ���ͼ�������������Ƚ��㷨��ʹ����Կ��١���̬�����ػ�ȡ������ά��Ϣ���ݣ��ﵽʵ�����Ƶ�Ŀ�ġ�
����2����
�ֳ�ʽɨ�����ֳ��ɼ�

�������α�־�����ֳ��ɼ�
��Ա��1-2��
�����Լ20000�O
ɨ����ʱ��29min
����3����
������ά����ɨ�����

��������������ݣ�������ʱ��30����

����һ����ά����չʾ
������ά���Ƹ���
����4����
�������ת����������
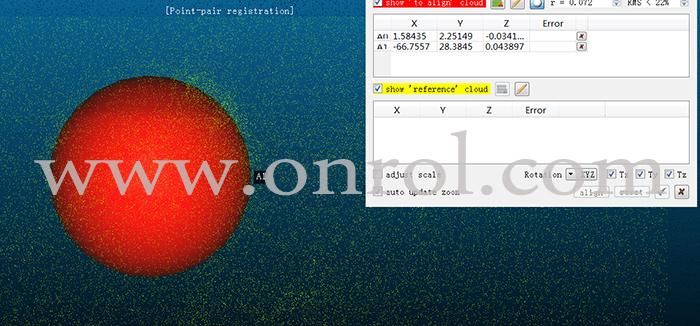
�����Զ�ʶ������ ����λ��

���Ϊɨ�����ݣ��Ҳ�Ϊ���Ƶ�

��������ת�����
����5����
���Ƶ���

������Ƭ

ȫ��������Ƭ�ֲ��������
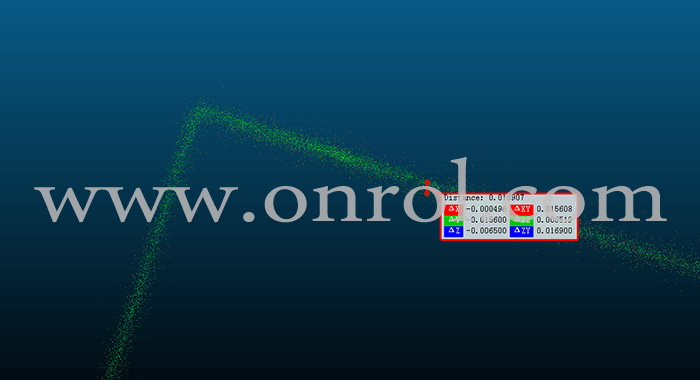
���ƺ��ԼΪ1.69cm
����6����
�������롢�Ƕȡ����
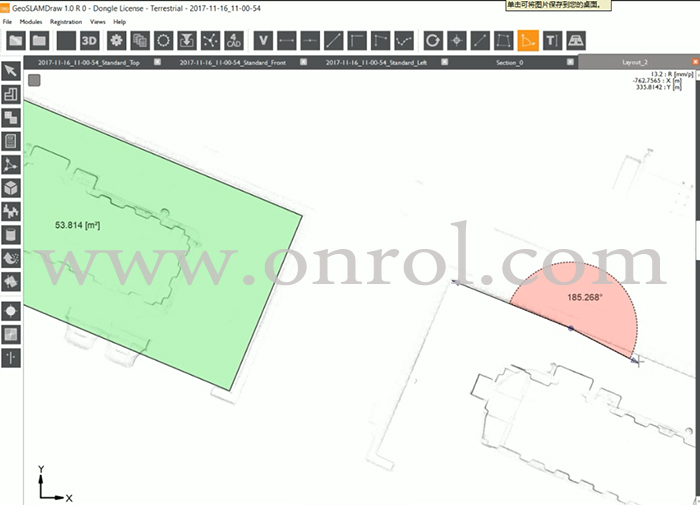
���Ƶ���CAD
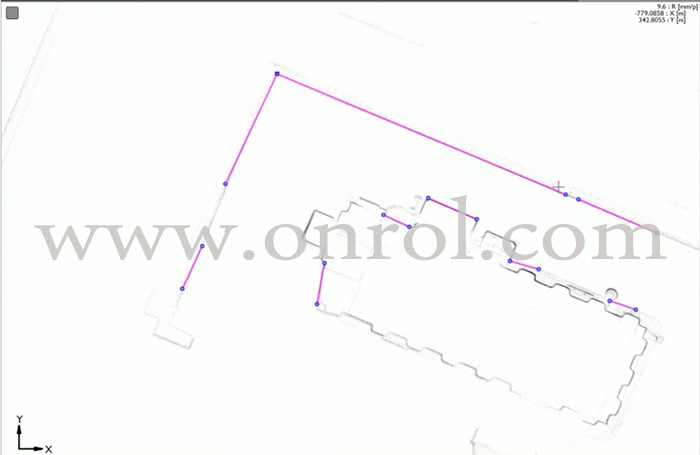
�Զ�ʰȡʸ����

����ƽ��ͼ
ʹ��Geoslamɨ���ǿɿ��ٲɼ�ȫ��Ҫ�ص��ֳ���������ʵ�ֵ��Ƶ�������Ƶؼ�ͼ��
Geoslamɨ����ƺ�ȿ��ȶ���2cm֮�ڡ�
���ֳ�ɨ�軷��ת������������ͼ���ȿɴﵽ5cm��
����Geoslam�����ݲɼ�����ȫ����ʵ�ʵ�����ڴ浵��鿴��
��һƪ�� ��Ӱ����������άɨ��
��һƪ�� ijʯ������ݵ���ά���ֻ��浵

- FARO����ϵ��
- Clear Edge����ϵ��
- 3D Reshaper����ϵ��
- Arena4D
- Artec ��������
- PhotoScan����ϵ��
- Onrol�����з���Ʒ



���������� 11010502049830��
��ICP��08006937��-1
��ϵ���ǣ�010-87513716