- 首页
- 关于我们
- 硬件设备
-
 Artec 3D扫描仪
Artec Ray II
Artec Eva
Artec Space Spider
Artec Leo
Artec Micro Ⅱ
Artec计量套件
Artec 3D扫描仪
Artec Ray II
Artec Eva
Artec Space Spider
Artec Leo
Artec Micro Ⅱ
Artec计量套件
-
 Faro 三维扫描仪
FARO® Focus Premium
FARO Focus Core
FARO® FREESTYLE 2
Faro 三维扫描仪
FARO® Focus Premium
FARO Focus Core
FARO® FREESTYLE 2
-
 Faro工业逆向扫描仪
Quantum Max FaroArm
FARO® Quantum Max ScanArm
Faro工业逆向扫描仪
Quantum Max FaroArm
FARO® Quantum Max ScanArm
-
 FARO跟踪仪
FARO® Vantage Laser Trackers
FARO跟踪仪
FARO® Vantage Laser Trackers
-
 FARO® Tracer 激光投影仪
FARO® Tracer 激光投影仪
FARO® Tracer 激光投影仪
FARO® Tracer 激光投影仪
-
 无人机倾斜摄影系统
MS-Smart2
无人机倾斜摄影系统
MS-Smart2
-
 RIEGL地面激光扫描仪
RIEGL VZ-400i
RIEGL VZ-2000i
RIEGL VZ-4000
RIEGL VZ-6000
RIEGL地面激光扫描仪
RIEGL VZ-400i
RIEGL VZ-2000i
RIEGL VZ-4000
RIEGL VZ-6000
-
 GoSLAM移动测量
便携式激光盘煤盘料仪
GoSLAM VS120
GoSLAM RS100S
GoSLAM RS100i
GoSLAM DS100
GoSLAM VS50/VS100
GoSLAM移动测量
便携式激光盘煤盘料仪
GoSLAM VS120
GoSLAM RS100S
GoSLAM RS100i
GoSLAM DS100
GoSLAM VS50/VS100
-
 DJI大疆无人机飞行平台
经纬 Matrice 200 V2 系列
经纬 M600 PRO
精灵 PHANTOM 4 RTK
经纬 Matrice 300 RTK
DJI大疆无人机飞行平台
经纬 Matrice 200 V2 系列
经纬 M600 PRO
精灵 PHANTOM 4 RTK
经纬 Matrice 300 RTK
-
 高分辨率航测相机
飞思 iXU 180
飞思 iXU 150
高分辨率航测相机
飞思 iXU 180
飞思 iXU 150
-
 协作机器人
协作机器人
协作机器人
协作机器人
-
 激光雷达
OS1-GEN 2激光雷达
激光雷达
OS1-GEN 2激光雷达
-
 三维扫描仪配件
标靶球(配准)
棱镜球(配准)
TSP定位装置
三维扫描仪配件
标靶球(配准)
棱镜球(配准)
TSP定位装置
-
 ATS定位配准套件
ATS定位配准套件
ATS定位配准套件
ATS定位配准套件
-
- 软件产品
-
 FARO软件系列
AS-BUILT FOR AUTOCAD®
AS-BUILT FOR REVIT®
FARO Scene2019
BUILDIT CONSTRUCTION
FARO软件系列
AS-BUILT FOR AUTOCAD®
AS-BUILT FOR REVIT®
FARO Scene2019
BUILDIT CONSTRUCTION
-
 Clear Edge软件系列
EdgeWise Plant
EdgeWise MEP For Revit
EdgeWise Building
EdgeWise Structure
ClearEdge Verity
Clear Edge软件系列
EdgeWise Plant
EdgeWise MEP For Revit
EdgeWise Building
EdgeWise Structure
ClearEdge Verity
-
 3D Reshaper软件系列
3D Reshaper
3D Reshaper LSDK
3D Reshaper软件系列
3D Reshaper
3D Reshaper LSDK
-
 Arena4D
Arena4D
Arena4D
Arena4D
-
 Artec 后处理软件
Artec Studio 17
Artec 后处理软件
Artec Studio 17
-
 PhotoScan软件系列
PhotoScan软件系列
PhotoScan软件系列
PhotoScan软件系列
-
 Onrol自主研发产品
空间数据浏览器
激光雷达综合应用平台
InfoPano
Onrol自主研发产品
空间数据浏览器
激光雷达综合应用平台
InfoPano
-
- 行业应用
- 成功案例
- 合作专区
- 技术支持
- 下载中心
- 培训专区
















此次竞赛中我公司提交的多项成果具有明显的技术优势。FARO Photon 120三维激光扫描仪,无论从速度以及扫描区域上来讲,都有着非常不错的表现,垂直320度 、水平360度能胜任一些现场比较局促的环境条件;每100多万的点获取速度,无疑是工作效率的好保障;采用同轴影像采集为点云真实赋色无偏离。

局部三维点云效果
建模技术流程:
首先安装KUBIT的PointCloud软件,该软件是CAD 下的应用程序,可以支持数以亿计的点云数据。扫描仪配套的FaroScence 软件便可以直接连接AuotoCAD,并拥有实时2D与3D绘图功能
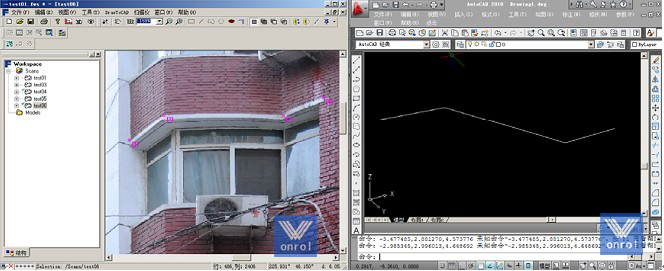
FaroScence 中对点云视图进行点击 AuotoCAD 中同步实时3D 建模
在FaroScence 点击视图中建筑结构点,同时在CAD 实时反馈真实的三维位置,并进行3D 建模。
在点云视图中定义3D 位置 在CAD 中定义3D 控制点
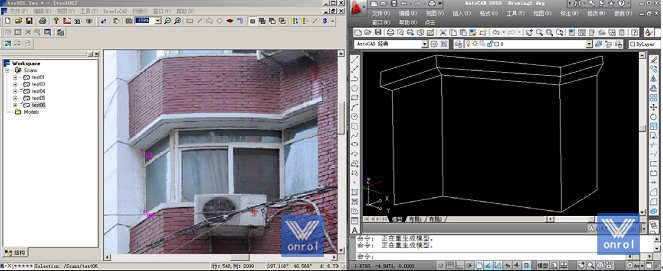
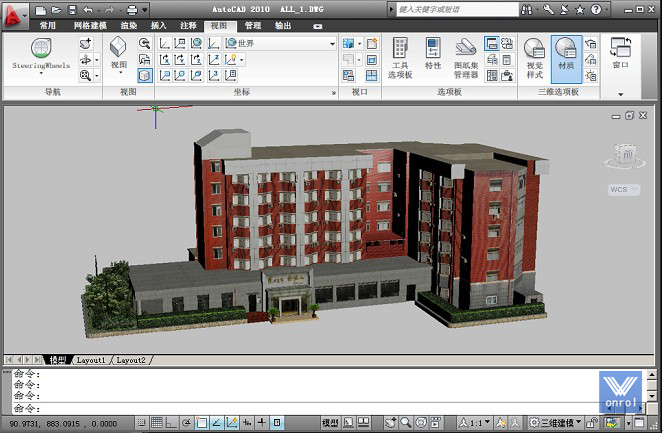
通过上述方法,在点云视图中的点击,以及配合CAD 中3D 建模命令快速的建立出准确的整个大楼的3D模型。

为3D 模型制作贴图,首先安装PhoToPlan 软件,该软件是在KUBIT系列中,可以在CAD 下进行正射影像校正的专业软件,首先我们找到拍摄的照片对应的点云数据:

拍摄照片 点云数据
通过点云数据在CAD 中定义控制点:
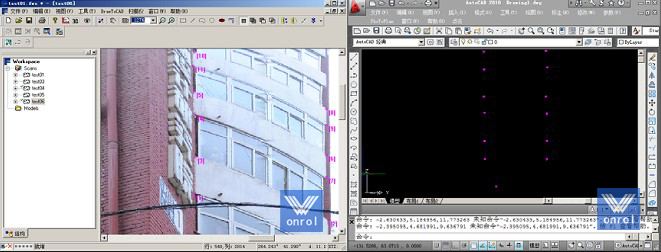
在点云视图中定义3D 位置 在CAD 中定义3D 控制点
通过PhoToPlan 软件的导入图片功能,加载拍摄的照片影像,并使用校正照片功能通过控制点对照片进行配准校正:
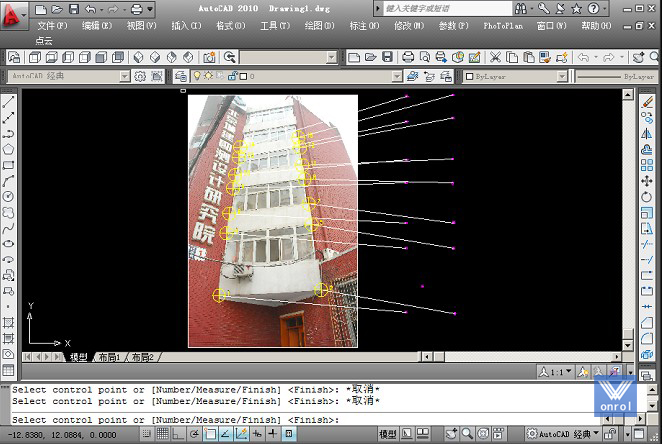
通过控制点与影像的相应位置进行对位配准
影像校正效果如下(左边为原始照片,右边为校正后):
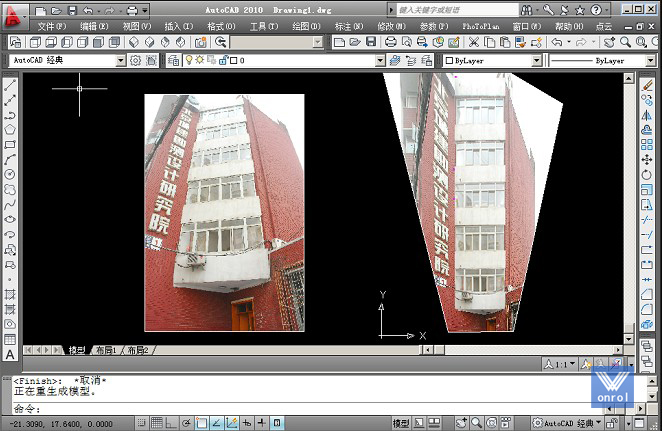
对需要的部分在CAD 中对局部进行截取,另存为其他名称的图像文件。在CAD 的3D 建模模式中,创建新的材质并赋予模型,通过选择图像功能选择刚刚截取好的贴图,使用真实视觉样式查看,效果如下:




京公网安备 11010502049830号
京ICP备08006937号-1
联系我们:010-87513716